

Underwater Intelligence with Aquatonomy
Designed key interactions and overall service for an autonomous underwater inspection system.



Aquatonomy turns murky depths into clear decisions for engineers in the field and at the office.
Meet the hardest-working teammate — the robot!
Aquatonomy builds autonomous robots that inspect and analyze underwater infrastructure. The tech was innovative, but the operator experience still had gaps.
I led the console review and linked field research to design. Interviews with divers and engineers revealed the need for clearer status cues and simpler processes, which I prototyped and tested to ensure the console worked in real inspections.
And honestly? After months of thinking about deep water, freezing divers, and robots bumping around in the dark...
I’ll never look at a dam the same way again.


Underwater inspections happen in some of the toughest conditions, and the complexity goes beyond the water.

Harsh Environments
Niche Users
Multi-User Workflows
High Stakes
Aquatonomy isn't a tool for one person, it's a system for a
network of people with different goals and contexts.
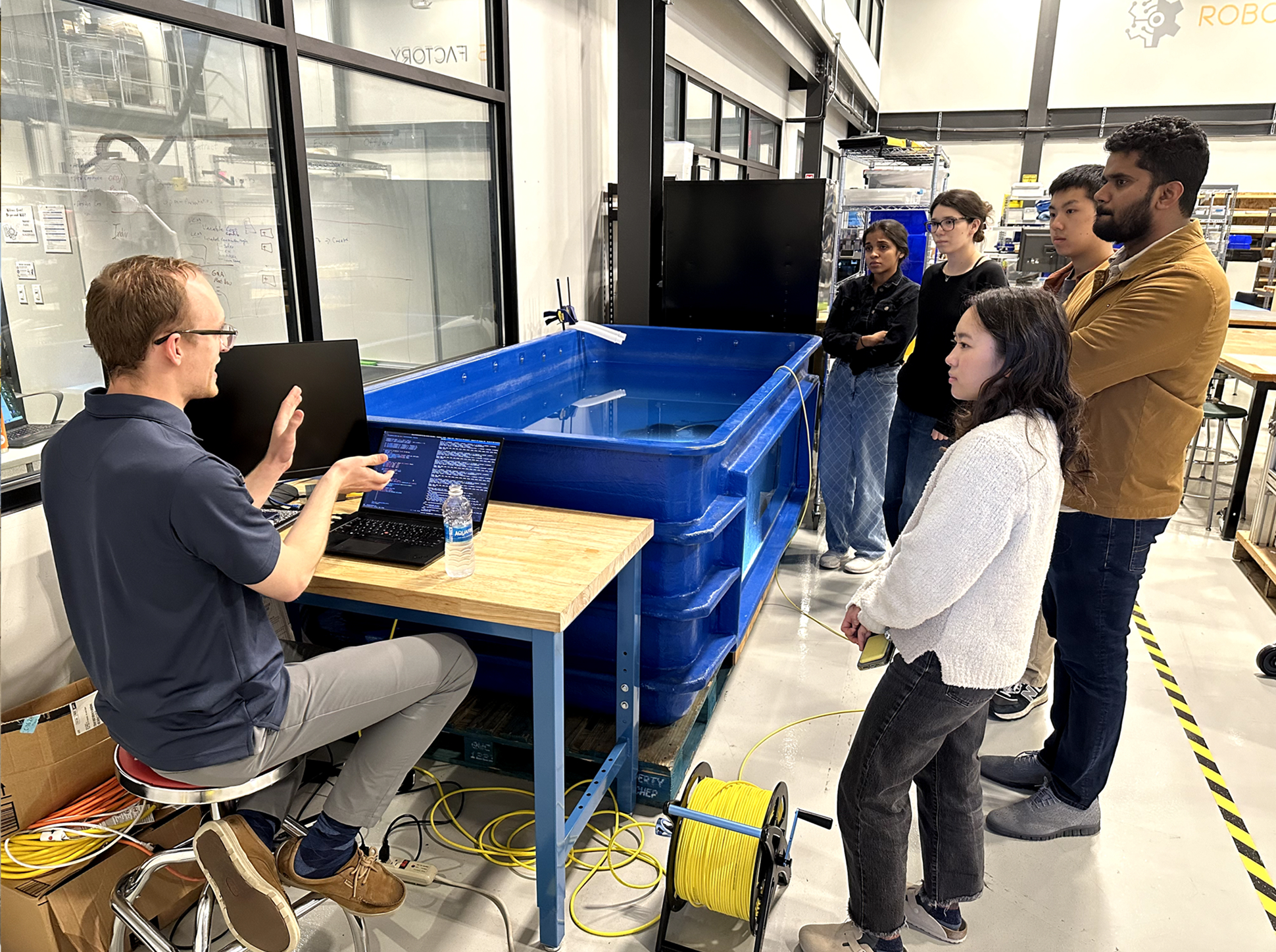
Learning how the robot and operators work together.
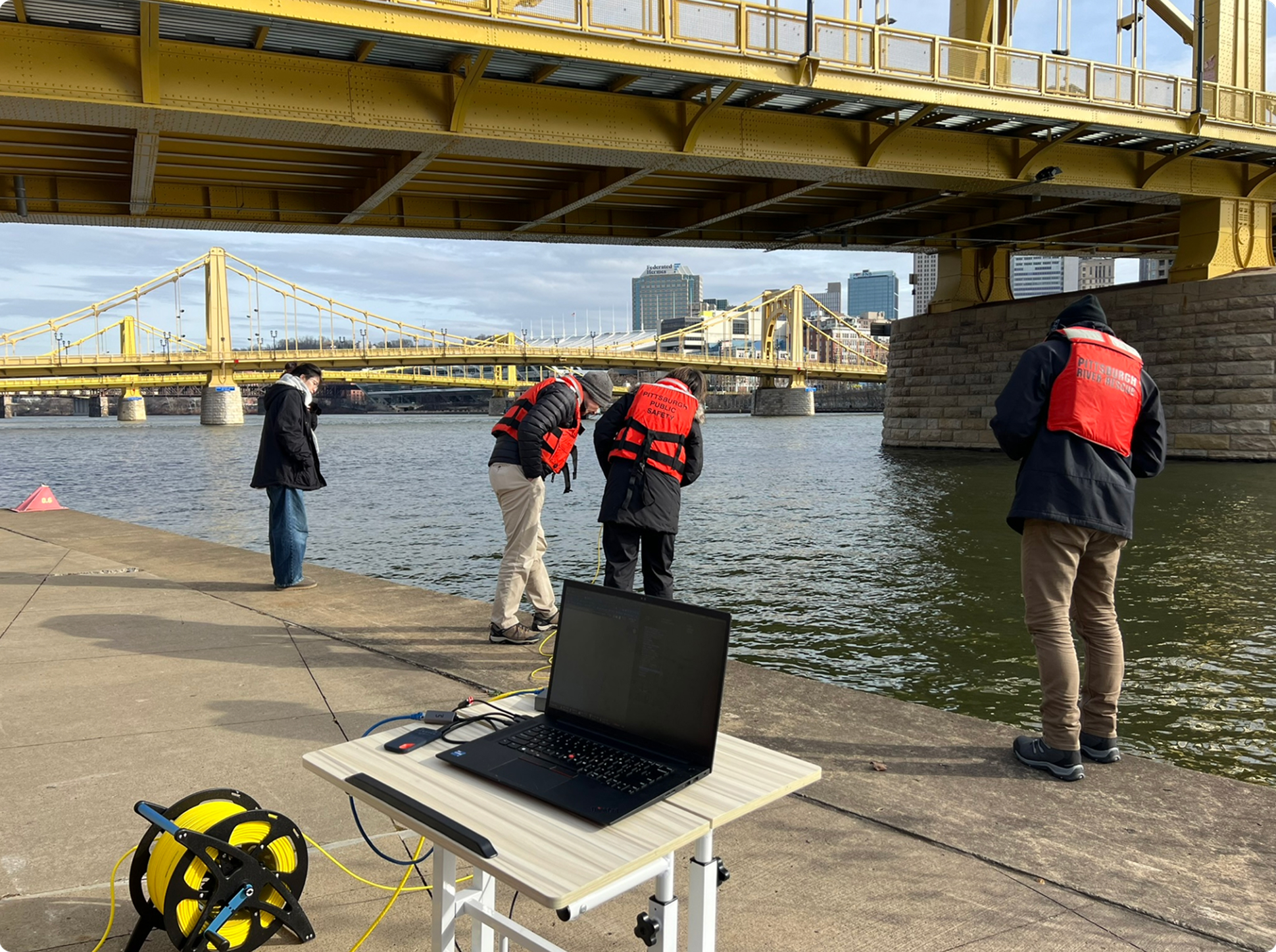
Deployment and field testing on the Allegheny River.

We turned a promising robot into a mission-ready console built for clarity under pressure.
On day one, operators showed us where the console broke down. Modes were hard to read, key actions took too many clicks, and there was no clear place to act.
We redesigned the workflow to remove guesswork at every step by reducing steps to take action and adding a simple history so teams can stay on track.
fewer steps in operator workflows
fewer operator errors from system states
hi-fi prototypes used to validate workflows
system blueprint adopted into product roadmap
We mixed field research, operator interviews, and fast prototypes to learn what really happens in underwater inspections.

Annotating current console workflows to identify pain points.
Evaluating the Existing Console
Heuristic reviews and expert reads exposed weak feedback, inconsistent labels, and click-heavy flows.

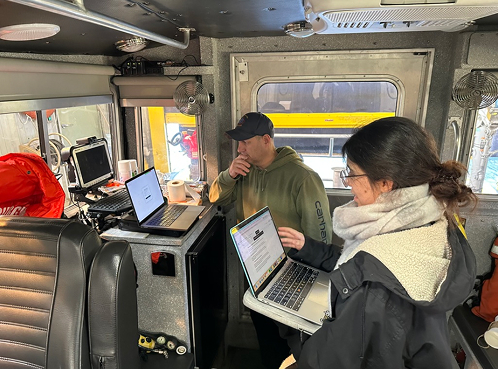
Exploring how teams prepare for water rescue missions.
Learning from the Field
We shadowed commercial divers and public safety officials to see inspections unfold both in the water and onshore.


Physical prototype for bodystorming in workshops.
Co-Design & Usability Testing
Bodystorming and usability sessions with operators and engineers helped us refine scenarios step by step.

Through discovery and testing, we uncovered insights that guided our iterative design process...

Operators need clear status signals to act decisively when they can’t see.

The system must support multiple roles on a unified platform.

Setup should take minutes, not hours. Delays waste time and add risk.
Usability must extend beyond experts to open broader markets.
We delivered operational improvements, validated features, and a blueprint for future growth.
We presented high-fidelity prototypes for handoff; these materials are under NDA — please contact me for additional details. Improvements are documented in the task flows and supporting artifacts, summarized in two key product features:
Operator Console Updates
Mission control patterns that improved situational awareness and enabled shared route planning.

3D Analysis Tools
Prototypes of new tools for reviewing scans, spotting defects, and verifying inspection data.
Robotics taught me that research turns uncertainty into direction when stakes are real.
While this project felt overwhelming at first, I learned design lives at the interface, not in the machine. My role wasn't to master algorithms, but to build trust for operators. This shift left me with three lessons to carry forward...
Failure as a Design Input
Reliability starts by designing for what goes wrong, not what should go right.
Strategy in Real Contexts
When process follows real people and contexts, decisions serve real needs.
Fast Prototypes, Big Impact
Quick, low-fidelity tests revealed the patterns that drove our final workflows and strategy.

Me vs. foam core and hot glue, round one!

The Aquatonomy robot in its natural habitat...